 |
Back to the homepage | |
|
Astronomically driven twin axis tracking control for gear motors
|
||
| CONTENT: basis version | extensions | specifications | price list |
|
For the tracking and positioning of one- or two-axial sun & daylight brightness deflect & control-systems. As well suitable to control shadow giving facilities.
|
 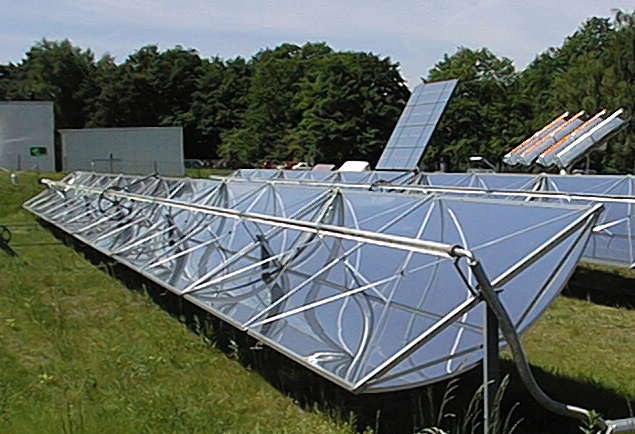 |
| parabolic solar trough concentrator in a solar power station (photos with kind permission of DLR/Cologne) |
|
|
Energy gathering out of an inexhaustible reserve. Deflect energy. Concentrate energy in focus. Collect energy without cost collects over years – easier, more comfortable, more effective!
|
 |
 |
 |
||
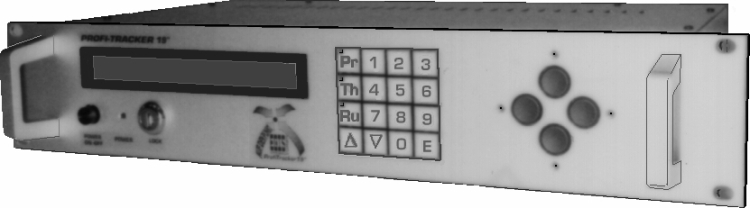
| computer with display (desktop version) | controlpanel in 19" rack mount (2 HE) (dimensions (W x H x D): approx. 484 x 88 x 255 mm) |
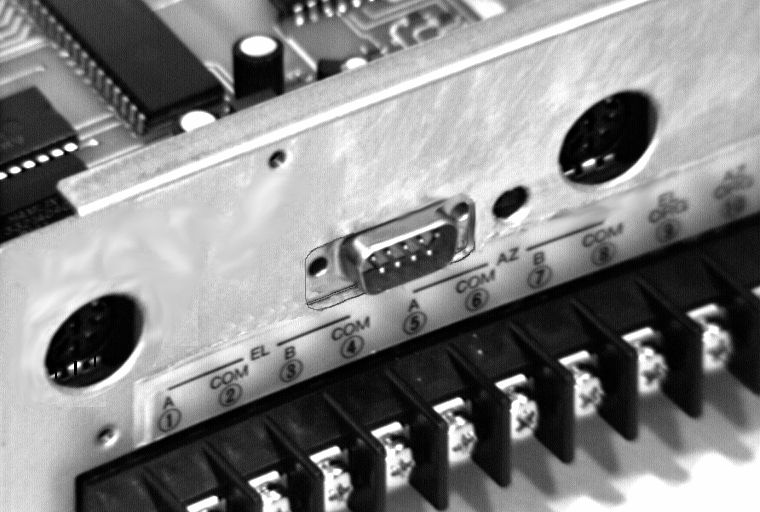
connectors (connecting cables for Wind-Sensor and Analog-Input are included) |
| DISPLAY-READOUT | ||||||||||||||
| operation status | mode | time | activity | day cycle | azimuth angle | elevation angle | ||||||||
| RUN | M | 15:34:48 | Go | S | AZ123.5 | EL015.2 | ||||||||
| CAUTION: Not all function are available on all versions and for each operating mode. | ||||||||||||||
|
The indoor unit consists out of a complete computer with rotor power supply. These electronics are established in a metal casing with front sided operating elements and a 40 digit LC-Display (image B). On the rear you will find the connection-clamps for the cable serving the rotor and the connectors for RS 232 C-interface and analog input, and the wind sensor interface as well (image G).
|
| BASIS VERSION | back to the beginning | |
|
Basis version: SOLAR-AUTO-CONTROLLER
is a micro-processor-guided controller which contains the positioning logic as well as the power unit for the relais and also for smaller motors. It is possible to drive two seperate relais/motors (max 2.5 A/axis) with dual backfeed-pulse-sensors – one for the elevation axis, one for the azimuth axis. The relais/motors are actuated by relais (semiconductor-version on request).
Features:
The complete control is implemented in the frontsided key panel (image B).
Motor-/Gear requirements:
Installation sequence: When mounting the load to be positioned mechanically (PV-panel, collector, measuring sonde etc.), the mechanical assembly has to be aligned roughly into the north-south direction only. Merely 4 parameters are to be entered after that:
After starting the system follows the sun day by day – completely automatic. If the sun leaves the angle-limits set by you, the rotor waits in his night-inoperative position for the next day and starts again his daily work in the right moment and at the right spot.
By clever setting the max. allowable angle-deviation or the next search-cycle, the system can be influenced motor sparing.
Wind-sensor-pulses can be transmitted to the control logic via the wind-sensor-interface for an automatic evaluation. This is used to drive to a programmable motor-/gear-position automatically, when a selectable wind speed threshold is exceeded (image G)! If the control system should drive the 24 V DC motors directly, a semiconductor-relais-version instead of mechanical relais can be delivered. This version then allows:
|
| EXTENSIONS & OPTIONS | back to the beginning | |
|
 |
 |
 |
 |
|||
| Both gear transmission as well as linear drive can go into action. | light direction finding tube |
shell-anemometer | Heliostat |
| SPECIFICATIONS | back to the beginning | |
| OPERATIONAL COMPUTER: EPS-103 mod. Solar | |||||||
| power supply | 223/115 Volt AC 16 Watt standby (100 Watt max.) or | ||||||
| 24 Volt DC 1 Watt Standby (100 Watt max.) | |||||||
| 12 Volt DC (optional) | |||||||
| motor control | 24 Volt DC / max. 2.5 Amp. | ||||||
| pulse frequency | max. 200 Hz | ||||||
| pulse width | min. 2.5 msec. | ||||||
| resolution | max. 65,000 pulses/axis | ||||||
| PRICE LIST | back to the beginning | |
| VERSION | | (excl. VAT) EURO | |||||||||
| SolarAutoController | bi axial solar positioning control for gear motors | 2 343.00 | ||||||||
| OPTIONS | | (excl. VAT) EURO | |||||||||
| DC 12 V | 12 V power supply for DC 24 V version | 478.35 | ||||||||
| ANALOG-Input | analogous signal-dependent positioning load/power dependent | 748.00 | ||||||||
| Data-Interface | Hard- & software extention RS 232 C interface | 798.00 | ||||||||
| GPS interface | GPS software interface | 549.00 | ||||||||
| is only supplied in combination with Data-Interface | ||||||||||
| GR-19 | basis unit fitted into a 19" rack mount (2 UH) | 998.00 | ||||||||
| Li-SP1 | for the easy and comfortable finding of the direction/position with the maximum of light | 378.00 | ||||||||
| Wi-S1 | wind-speed-sensor/shell-anemometer | 317.35 | ||||||||
|
Please tell us about your particular special application!
Technical improvements are subject of change! |
| CONTENT: basis version | extensions | specifications | price list |
| EGIS Cloud |

|
E G I S
EQUIPMENT GESELLSCHAFT für INTERN. ELEKTRONIK SYSTEME GmbH |
Flutstraße 34 – 36
D–63071 OFFENBACH/MAIN Tel.: 069 / 85 83 27 Fax: 069 / 85 78 63 |
| << Homepage | 20 minutes from Airport Frankfurt – 20 minutes to Frankfurt City | E-Mail: Solar@egis.eu |

